Review Jurnal
ROBOT PEMBERSIH LANTAI BERBASIS ARDUINO UNO DENGAN SENSOR ULTRASONIK
Amir Mukhlis
amirmukhlis06@gmail.com
Abstrak
Pada prinsipnya tujuan penciptaan robot adalah untuk mempermudah pekerjaan manusia agar lebih efektif dan efisien. Robot pembersih ini dibuat untuk meringankan pengguna agar dapat membersihkan rumah secara efektif dan efisien. Karena robot ini dikendalikan dengan arduino sebagai otaknya. Robot ini bergerak maju sampai bertemu halangan berupa tembok maka robot ini akan berbelok ke kiri otomatis untuk menghindari halangan dan terus membersihkan lantai yang belum di bersihkan. Bergerak maju mengunakan motor DC dan mengepel lantai menggunakan sikat yang dikendalikan oleh motor DC. Sensor Ultrasonik yang terpasang pada depan robot berfungsi sebagai penentu jarak.
Kata kunci : Robot pembersih lantai otomatis, Mikrokontroller, Sensor Ultrasonik.
1. Pendahuluan
Perkembangan Ilmu pengetahuan dan teknologi mempengaruhi kehidupan masyarakat untuk melangkah lebih maju, praktis dan simple. Robot otomatis sangat dibutuhkan dalam kehidupan ini, apalagi kemajuan zaman menuntut pekerjaan manusia yang efektif dan efisien. Pada perkembangannya sekarang ini telah banyak di ciptakannya berbagai macam robot yang bergerak otomatis dengan menggunakan sensor sebagai system control ataupun yang dikendalikan secara manual oleh manusia melalui remot control. Untuk lebih praktis dan efisien penggunaan sensor ultrasonic sangat mempengaruhi pergerakan pada robot pembersih ini. Karena dalam penggunaanya robot pengepel ini dapat berjalan dan menghindari halangan di depannya sendiri tanpa bantuan remote control atau campur tangan manusia. Ukuran robot ini kecil cocok ditempatkan di dalam rumah dan tidak memakan banyak tempat. Dengan menggunakan sensor ultrasonic maka robot dapat menghindari halangan yang berada di depannya. Pada penelitian ini akan dibahas tentang robot pembersih lantai, dimana robot ini di rancang dengan bentuk seperti mobil yang di bawahnya terdapat busa pengepel. Robot ini bergerak secara otomatis dengan sensor ultasonik sebagai system control. Motor DC digunakan sebagai pengerak robot serta menambahkan push button tombol untuk mengatur data jarak dan motor pada pengepel dan menampilkan data (pengaturan) tersebut pada layar LCD (liquid Cristal Display).
2. Landasan Teori
1.1 Arduino Uno
Arduino Uno adalah salah satu produk berlabel Arduino yang sebenarnya adalah suatu papan elektronik yang mengandung mikrokontroller Atmega 328 (sebuah keping yang secara fungsional bertindak seperti sebuah komputer). Dengan penambahan komponen tertentu, Arduino Uno ini bisa dipakai untuk pemantau jarak jauh melalui internet.
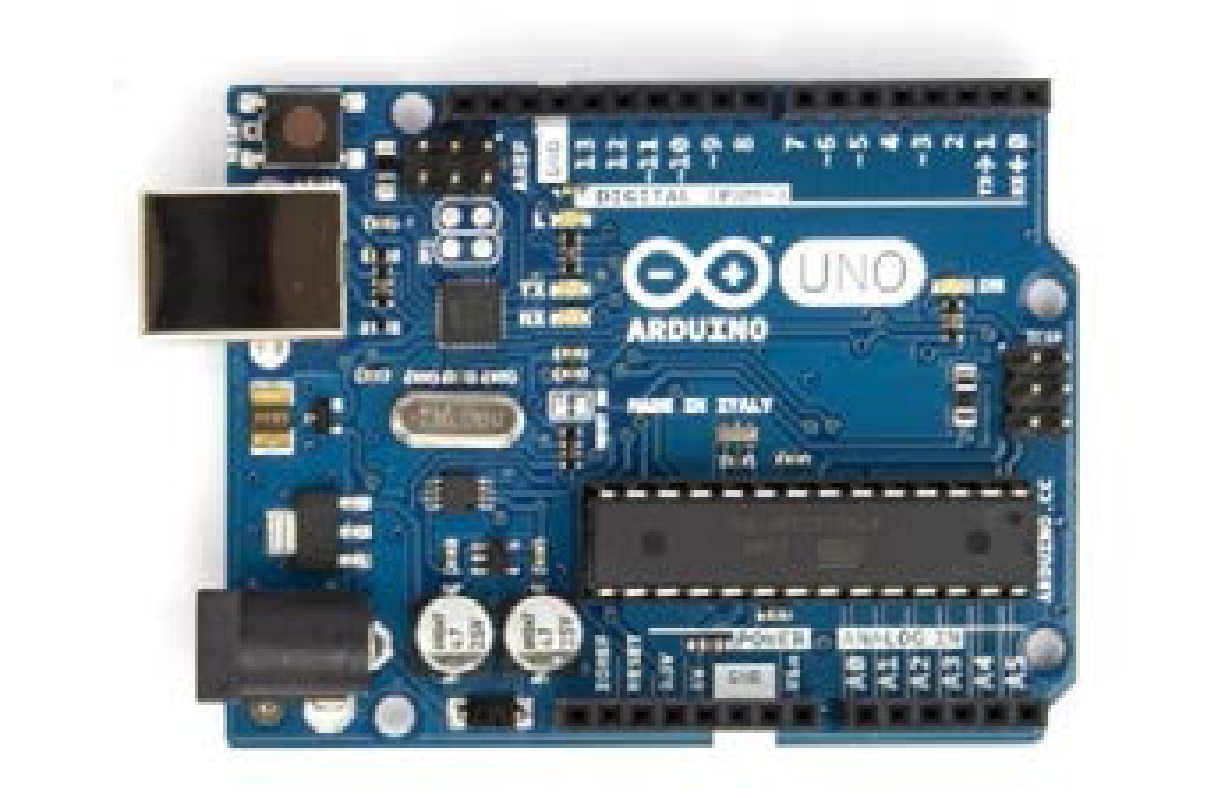
Gambar 1.1 Arduino Uno
Arduino Uno mengandung mikroposesor (berupa Atmel AVR) dan dilengkapi dengan oscillator 16MHz (yang memungkinkan operasi berbasis waktu dilaksanakan dengan tepat), dan regulator (pembangkit tegangan) 5 volt. Sejumlah pin tersedia di papan. Pin 0 hingga 13 digunakan untuk isyarat analog. Arduino Uno dilengkapi dengan static random-access memory (SRAM) berukuran 2KB untuk memegang data, flash memory berukuran 32KB, dan erasable programmable read-only memory untuk menyimpan program.
1.2 Motor Driver L298
L298 adalah jenis IC driver motor yang dapat mengendalikan arah putaran dan kecepatan motor DC ataupun Motor stepper. Mampu mengeluarkan output tegangan untuk Motor dc dan motor stepper sebesar 50 volt. IC l298 terdiri dari transistor-transistor logik (TTL) dengan gerbang nand yang memudahkan dalam menentukkan arah putaran suatu motor dc dan motor stepper. Dapat mengendalikan 2 untuk motor dc namun pada hanya dapat mengendalikan 1 motor stepper.

Gambar 1.2 Contoh Motor Shield L298
Untuk menggerakkan robot menggunakan motor DC yang dihubungkan langsung dengan Motor Shield L298 dan dikendalikan langsung oleh keluaran dari mikrokontroler.
1.3 Sensor Elektronik
Gelombang ultrasonik merupakan gelombang yang memiliki frekuensi tinggi, dimana gelombang tersebut berada diatas gelombang suara sehingga tidak dapat didengan manusia. Gelombang ultrasonik berada pada frekuensi diatas 20kHz. Sensor ultrasonic merupakan sensor utama untuk navigasi dan penghindar halangan.

Gambar 1.3 Sensor Ultrasonik
Cara kerja dari sensor ini adalah ketika sensor ini memancarkan gelombang ultrasonik, gelombang tersebut mengenai suatu objek maka objek tersebut akan memantulkan gelombang ultrasonik itu kembali ke sensor, sehingga sensor dapat mengetahui jaraknya terhadap benda tersebut dan jika jaraknya terlalu dekat maka sensor akan mengirimkan inputan pada arduino untuk menjauhi objek.
1.4 Motor DC
Motor DC adalah motor yang menggunakan sumber tegangan DC dan digunakan untuk mengubah tenaga listrik menjadi tenaga mekanis. Komponen ini bekerja dengan prinsip electromagnet. Kecepatan putaran motor DC ditentukan oleh besar tegangan.

Gambar 1.4 Motor DC
Sumber tegangan yang digunakan motor DC perlu diambil dari sumber eksternal, misalnya berupa baterai atau regulator, bukan dari Arduino Uno. Hal ini disebabkan Arduino Uno tidak dirancang untuk memasok tegangan ke motor DC. Pin-pin Arduino Uno hanya bisa memberikan arus 60mA, sedangkan kebutuhan motor sekitar 500mA untuk membuat putaran maksimum.
1.5 LCD (Liquid Crystal Display)
LCD (Liquid Cristal Display) adalah salah satu jenis display elektronik yang dibuat dengan teknologi CMOS logic yang bekerja dengan tidak menghasilkan cahaya tetapi memantulkan cahaya yang ada di sekelilingnya terhadap front-lit atau mentransmisikan cahaya dari back-lit. LCD (Liquid Cristal Display) berfungsi sebagai penampil data baik dalam bentuk karakter, huruf, angka ataupun grafik.
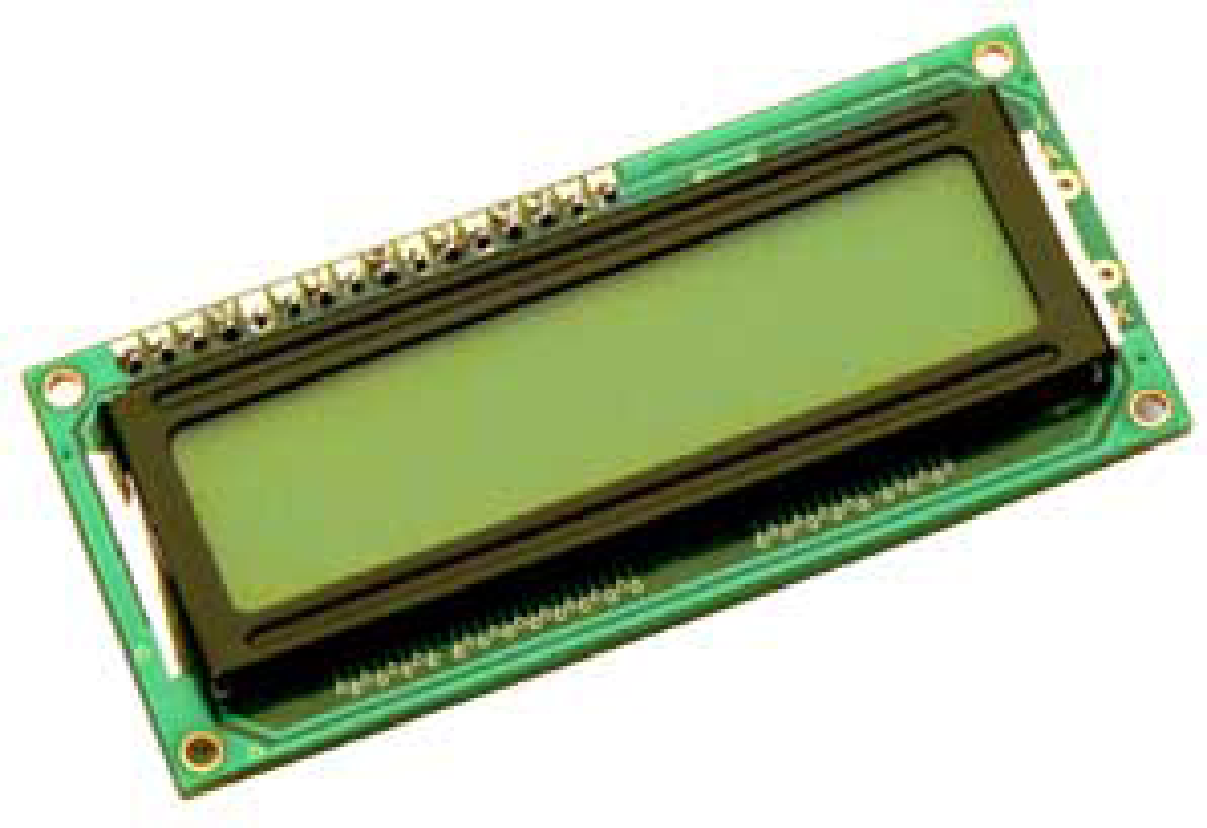
Gambar 1.5 LCD
1.6 Relay
Relay adalah saklar listrik atau elektrik yang membuka atau menutup sirkuit atau rangkaian lain dalam kondisi tertentu. Relay pada dasarnya adalah sakelar yang membuka dan menutupnya dengan tenaga listrik melalui coil relay yang terdapat di dalamnya.

Gambar 1.6 Relay
1.7 Push Button Switch
Push button switch adalah perangkat atau saklar sederhana yang berfungsi untuk menghubungkan atau memutuskan aliran arus listrik dengan sistem kerja tekan unlock (tidak mengunci).

Gambar 1.7 Push Button Switch
Sebagai device penghubung atau pemutus, push button switch hanya memiliki 2 kondisi, yaitu On dan Off. Istilah On dan Off ini menjadi sangat penting karena semua perangkat listrik yang memerlukan sumber energi listrik pasti membutuhkan kondisi On dan Off.
2. Perancangan
2.1 Perancangan Hardware
Dalam perancangannya, pembersih lantai otomatis ini menggunakan Arduino Uno sebagai dasar utamanya, sehingga diperlukan sebuah modul Arduino Uno untuk menjadi otak dasarnya. Berikut adalah blok diagram sistem elektrikal pada alat pembersih lantai.

Gambar 2.1 blok digram
2.2 Perancangan Elektrikal
Dalam pembuatan sebuah robot tentunya tidak terlepas dari adanya system elektrikal. Perancangan ini adalah pembuatan regulator, pemasangan motor DC, penempatan motor driver, pemasangan sensor ultrasonic, pengaturan tombol dan penampilan pada LCD. Berikut adalah perancangan elektrikal yang dibuat menggunakan proteus isis 7 profesional.
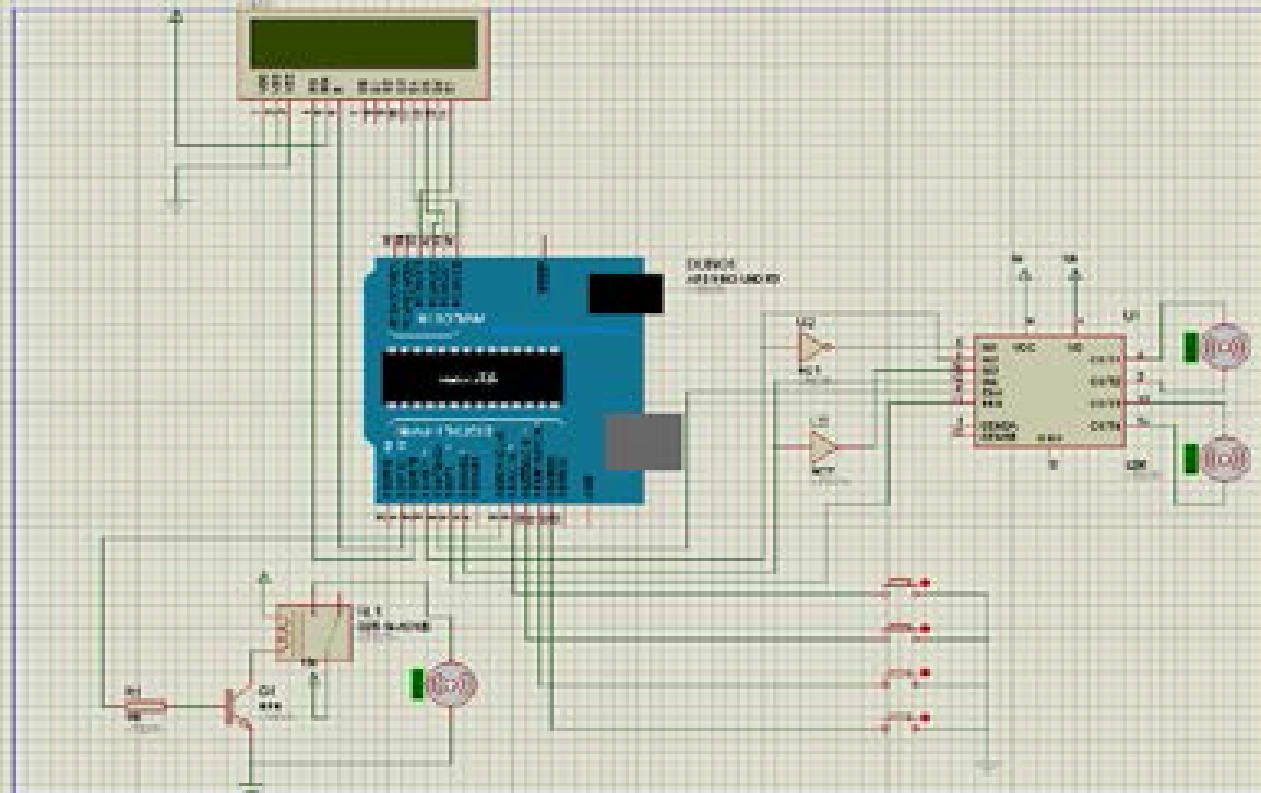
Gambar 2.2 Perancangan Elektrikal
2.3 Pemograman
Pemograman robot pada umumnya dilakukan ditahap akhir, setelah perancangan mekanik dan elektrik terselesaikan. Fungsi dari robot ini adalah robot untuk membersihkan permukaan lantai yang kotor menjadi bersih. Berikut adalah gambar pemograman pada robot dengan program arduino Uno.

Gambar 2.3 Pemograman Pada Arduino
3. Hasil Perancangan
Setelah melewati beberapa tahap, maka terbentuklah sebuah robot yang dapat difungsikan sebagai pengepel lantai. Berikut gambar perancangan robot.

Gambar 3.1 Hasil Perancangan Robot
Pada gambar diatas dapat dilihat bentuk robot pengepel lantai. Yang terbentuk dari beberapa bagian robot yaitu, robot beroda yang di depannya terdapat busa pembersih serta sensor ultrasonic pada bagian atasnya guna mendeteksi jarak.
3.1 Pengujian secara keseluruhan
Robot pembersih lantai ini dapat membersihkan lantai dengan pengepel yang terdapat dibagian bawah robot. Robot ini dapat bergerak maju sampai terdapat halangan didepannya. Sebelum dilakukan pengujian pada robot secara keseluran dirancanglah sebuah program yang mencakup seluruh program perangkat penyusun dari robot ini. Berikut gambar program keseluruhan robot pembersih lantai.

Gambar 3.2 Program Keseluruhan Robot
Program pada gambar merupakan contoh program keseluruhan dengan segala prinsip dan logika kerja dari robot pembersih ini. Untuk memahami perintah pada mikrokontroller dan robot dan untuk memahami bagaimana kinerja robot ini, berikut akan dipaparkan ke dalam sebuah diagram flowchart

Gambar 3.3 Flowchart
Dari pembacaan flowchart tersebut dapat dilihat bahwa gerak motor dipengaruhi oleh motor DC. Sensor ultrasonic mempunyai fungsi untuk mendeteksi adanya halangan di depan dan alat pembersih ini akan berbelok ke kiri sebesar 90 derajat, maju dan berbelok ke kiri lagi sebesar 90 derajat. Dari perancangan di atas maka di dapatkan cuplikan video seperti dibawah ini.



Gambar 3.4 Cuplikan Video Robot
4. Kesimpulan
4.1 Kesimpulan
Percobaan dari jurnal ini bertujuan untuk mengatahui hasil dari pengujian power supply, tegangan output yang keluar adalah 4,97 VDC. Tegangan ini sesuai dengan rating tegangan arduino Uno, IC Motor Driver L298, sensor ultrasonic, LCD, dan Relay yakni 5.00 VDC. Kemudian robot dapat menghindari halangan dan berbelok 90 derajat ke kiri kurang sempurna karena torsi dari motor DC robot kurang kuat untuk menggerakkan robot berbelok. Dan juga untuk mengetahui hasil dari pengujian, pengepel dapat berputar, akan tetapi putaran sikat mengakibatkan pergerakkan robot menjadi tidak stabil.
4.2 Saran
Saran pada percobaan perancangan robot pembersih lantai ini terdapat pada proses kerja robot yang belum begitu sempurna dalam gerakannya karena tidak dapat berbelok 90 derajat disebabkan torsi motor yang tidak sebanding dengan berat robot. Saat proses pemrograman robot maju hasilnya tidak bergerak maju karena sikat robot bergerak terlalu kencang sehingga menekan lantai membuat robot menjadi tidak seimbang. Untuk itu disarankan agar pengembangan robot ini dapat dirancang sedemikian rupa sehingga menjadi karya yang lebih baik dan bermanfaat.
DAFTAR PUSTAKA
- Kadir Abdul. 2013. Panduan Prkatis Mempelajari Aplikasi Mikrokontroler dan Pemogramannya Menggunakan Arduino. Yogyakarta: C.V ANDI OFFSET.
- Halim Sandy. 2007. Merancang Mobile Robot Menggunakan OOPic-R. Jakarta: PT. Elex Media Komputindo.
- Budiharto Widodo. 2006. Belajar Sendiri Membuat Robot Cerdas. Loc.Cit.
- Prabowo Barkah. 2007. Robot Pembersih Lantai Otomatis Berbasis Mikrokontroler AT89S52. Fakultas Ilmu Komputer
- Budiharto Widodo. Belajar Sendiri Membuat Robot Cerdas. Jakarta: PT. Elex Media Komputindo.
- Marsudi, Jepri. 2014. “Perancangan Robot Ular Pemantau Keadaan Berbasis Arduino Nano”. Jurnal Teknik Elektro Mercu Buana